强化学习是机器学习的一个重要分支,包含两种基本元素:状态和动作,旨在学习一种策略,在某种状态下执行某种动作,找到一个状态到动作的映射。
基本要素
强化学习中使用马尔可夫决策过程来描述,机器处于一个环境中,每个状态为机器当前环境的感知,机器只能通过动作来影响环境,当机器执行一个动作后,使得环境按某种概率转移到另一个状态,同时,环境根据潜在的奖赏函数反馈给机器一个奖赏。一般包含四个要素:状态,动作,转移概率及奖赏函数
- 状态(X):机器对环境的感知,所有可能的状态称为状态空间
- 动作(A):机器所采取的动作,所有能采取的动作构成动作空间
- 转移概率(P):当执行某个动作后,当前状态会以某种概率转移到另一个状态
- 奖赏函数(R):状态转移后,环境会给机器一个奖赏
强化学习的主要任务就是通过在环境中不断尝试,获得反馈信息调整策略,最终生成一个较好的策略,并根据这个策略在环境中运作
- 确定性策略:, 即在状态x下执行a动作
- 随机性策略:, 在状态x下执行a的概率
一个策略的优劣取决于长期执行这个策略后的累积奖赏,也就是用累积的奖赏来评价策略的好坏,最优策略表示在初始状态下一直执行该策略后,最后的累积奖赏值最高。
- T步累积奖赏:,即执行策略T步的平均奖赏的期望值
- r折扣累积奖赏:, 一直执行到最后,越往后奖赏权重越低
K摇摆赌博机
考虑强化学习最简单的情形:一步操作就可以得到奖赏结果。
要最大化奖赏,就需要知道每个动作带来的期望奖赏值,如果每个动作奖赏都是确定的,那么只要尝试一遍即可。一般的,一个动作的奖赏值来源于一个概率分布,因此需要多次尝试
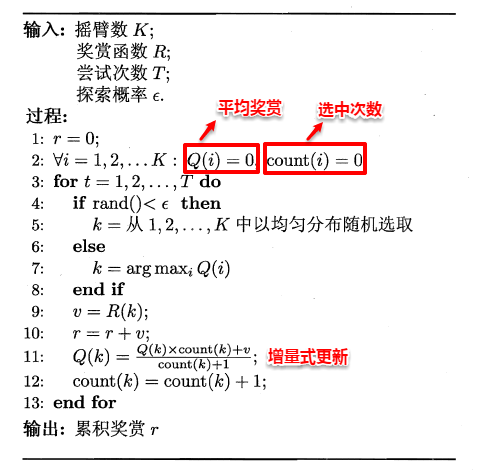
单步强化学习的实质是K-摇臂赌博机(K-armed bandit),由于尝试的次数有限,需要有利用有限次数有效探索的策略:
- 仅探索:将机会均分,轮流执行每个动作,最终根据每个动作的平均奖赏作为期望奖赏的近似值
- 仅利用:尝试的机会分给当前平均奖赏值最大的动作
仅探索法可以估算每个动作的期望奖赏,可没能根据当前反馈结果调整尝试策略,仅利用法每次尝试之后都更新策略,符合强化学习的思路,但是容易找不到每次的最优动作
-贪心
这基于一个概率对探索和利用进行折中,具体而言,每次尝试时,以的概率机型探索,以 的概率进行利用,选择最优的动作。只需记录每个动作当前的平均奖赏值和被选中的次数,便可以增量式更新
Softmax
算法基于当前每个动作的平均奖赏对探索和利用进行折中,Softmax将一组值转换为概率,值越大概率越大,当前平均奖赏值越高的动作被选中的几率也越大
除了k的选择根据上述式子选取之外,其余都与上述流程相同
有模型学习
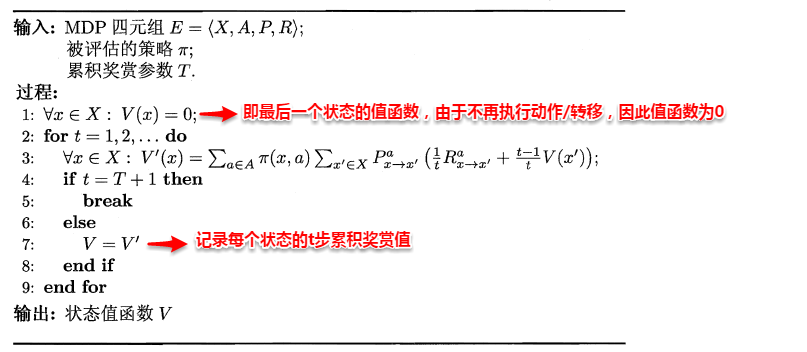
若学习任务中四个要素已知,状态空间、动作空间、转移概率和奖赏函数都已知,这样的情形称为“有模型学习”。假设状态空间和动作空间均有限,那么不用尝试就能对某个策略及评估
- 状态值函数(V):V(x),从状态X出发,使用策略后带来的累积奖赏
- 状态-动作值函数(Q):Q(x, a),状态x出发,执行动作a后再使用策略得到的累积奖赏
按累积奖赏的定义分成:T步累积奖赏与r折累积奖赏
由于MDP具有马尔可夫性,即现在决定未来,将来和过去无关,可以找到值函数的递归关系
其中第二步为全概率公式展开,外部求和,是对所有可能的行为加权求和,权重是行动的概率,内部求和,某个行动后,对所有可能的下一状态加权求和,权重就是转移到该状态的概率
这样就求出了递归关系
类似的,对折扣累积奖赏可以得到:
当模型已知,策略评估转化成一种动态规划,先求解每个状态的单步累积奖赏,再求解每个状态的两步累积奖赏,移植到逐步求解出每个状态的T步累积奖赏
同样的,对于状态-动作函数,有: